|
Angelos Mavrogiannis In fall 2025 I am returning at LinkedIn as a full-time Machine Learning Engineer. I recently (July 2025) received my PhD from the department of Computer Science at the University of Maryland, College Park (UMD). At UMD, I was a member of the Perception and Robotics Group where I worked in the intersection of Robotics and Natural Language Processing, advised by Prof. Yiannis Aloimonos. Prior to this, I received a Master of Science in Computer Science from UMD and a Master of Science in Mechanical Engineering from Carnegie Mellon University. At CMU, I was a member of the Intelligent Control Lab at the Robotics Institute and my thesis focused on driver behavior classification, advised by Prof. Changliu Liu. Prior to CMU, I received my diploma (BS & MEng) in Mechanical Engineering and Aeronautics from the University of Patras (Greece). For my diploma thesis, I worked with Prof. Argyris Dentsoras on the development of a framework for automatic parsing and solution of optimization problems formulated in structured language. Email / CV / LinkedIn / Google Scholar / Twitter / Github / SoundCloud |

|
ResearchI am interested in the intersection of Robotics and Natural Language Processing (RoboNLP), and more specifically in leveraging linguistic traits to enrich robots with commonsense reasoning. |
News
July 2025: I have been awarded a PhD by the Computer Science Department at the University of Maryland, College Park. |
|
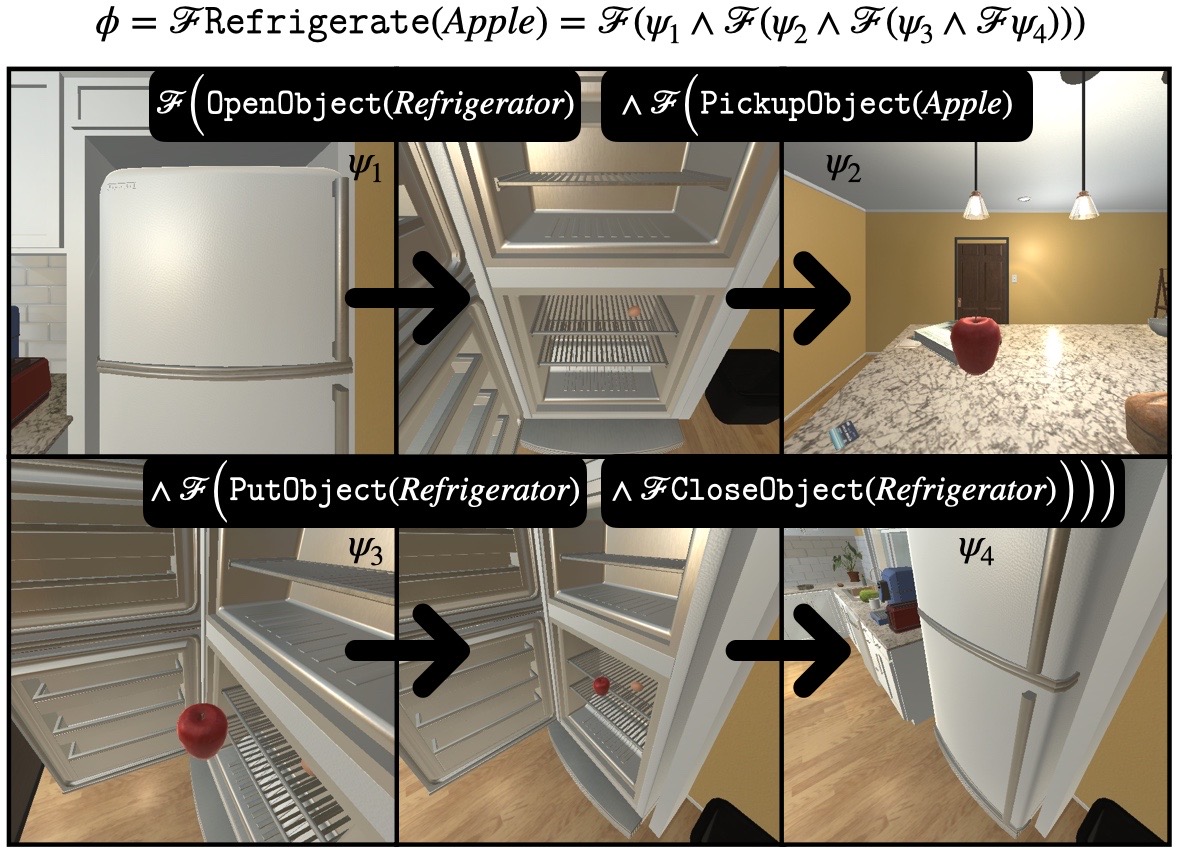
Translating Natural Language to Visually Grounded Verifiable Plans
Angelos Mavrogiannis (PhD Thesis Defense, Brendan Iribe Center for Computer Science, College Park, MD, USA) In this thesis, we present the development of a framework that translates natural language instructions to verifiable action plans and grounds object attributes through active perception robot policies. By leveraging Large Language Models (LLMs), Linear Temporal Logic (LTL), and Planning Domain Definition Language (PDDL), the system translates language—such as cooking recipes—into executable robot controllers, modeling action preconditions and effects from visual observations. This approach was validated on a ROS-based robot capable of following natural language instructions to perform simple cooking tasks on a kitchen counter. |
|
Discovering Object Attributes by Prompting Large Language Models with Perception-Action APIs
Angelos Mavrogiannis, Dehao Yuan, Yiannis Aloimonos IEEE International Conference on Robotics and Automation (ICRA), 2025 (Oral Presentation, ICRA 2025, Atlanta, Georgia, USA) (Poster Presentation, ICRA@40, Rotterdam, Netherlands) (ICRA@40 Travel Grant) arXiv / website / code / video / poster We present a perception-action programming API that consists of Vision Language Models (VLMs) and Large Language Models (LLMs) as backbones, together with a set of robot control functions. When prompted with this API and a natural language query, an LLM generates a program to actively identify attributes given an input image. |
|
Cook2LTL: Translating Cooking Recipes to LTL Formulae using Large Language Models
Angelos Mavrogiannis, Christoforos Mavrogiannis, Yiannis Aloimonos IEEE International Conference on Robotics and Automation (ICRA), 2024 (Oral Presentation, ICRA 2024, Yokohama, Japan) paper / arXiv / website / code / video / poster Cook2LTL is a system that receives a cooking recipe in natural language form, reduces high-level cooking actions to robot-executable primitive actions through the use of LLMs, and produces unambiguous task specifications written in the form of LTL formulae. |
|
B-GAP: Behavior-Rich Simulation and Navigation for Autonomous Driving
Angelos Mavrogiannis, Rohan Chandra, Dinesh Manocha IEEE Robotics and Automation Letters (RA-L), 2022 (Oral Presentation, IROS 2022, Kyoto, Japan) (IROS Student and Developing Countries Travel Award) paper / arXiv / website / code / video B-GAP is a new simulation technique consisting of enriching existing traffic simulators with behavior-rich trajectories corresponding to varying levels of aggressiveness. After generating these trajectories with the help of a driver behavior modeling algorithm, we use an enriched simulator to train a Deep Reinforcement Learning (DRL) policy that consists of a set of high-level vehicle control commands and apply this policy at test time to perform local navigation in dense traffic. |
|
Human Driver Behavior Classification from Partial Trajectory Observation
Angelos Mavrogiannis, Changliu Liu Technical Report, 2020 (Carnegie Mellon Mechanical Engineering Research Symposium Award) ResearchGate / code / video We extract high-level features from raw vehicle trajectory data and classify drivers into behavioral classes based on their level of aggressiveness. We demonstrate how the identification of a driver's behavior improves the accuracy of the short-term trajectory prediction problem by introducing a prior knowledge on their behavior. |
|
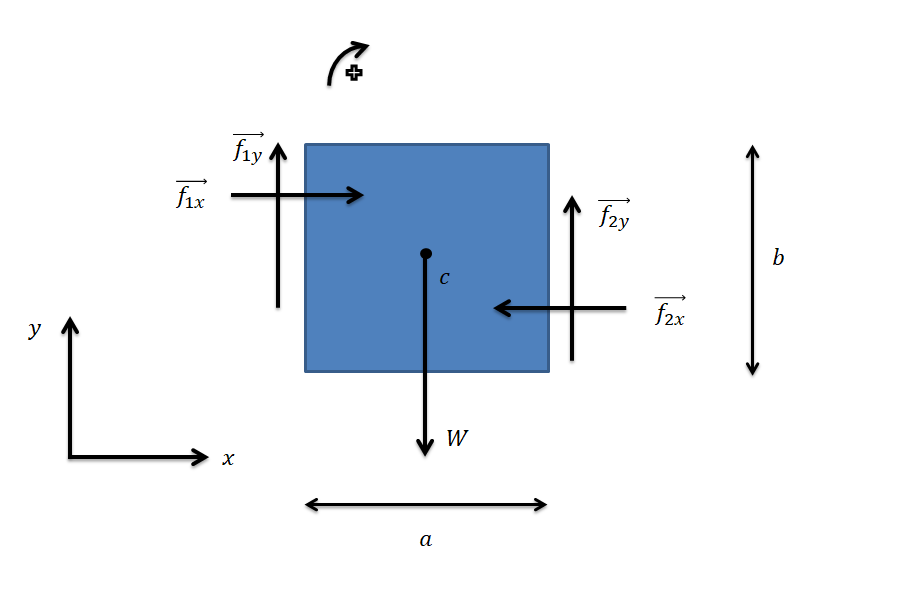
Genetic-Algorithm-based Optimization Framework
Angelos Mavrogiannis, Argyris Dentsoras Technical Report, 2017 report (in greek) / code We developed a framework on Visual Basic that receives mathematical expressions as input, analyzes them using a suitable parser, and optimizes them with genetic algorithms. The parser allows the input of the expressions in string format and distinguishes the variables, the parameters and the operational symbols. Besides the equations, the user can choose between a set of genetic algorithms for the optimization, as well as the hyperparameters. The implemented software was tested and validated on two applications: the minimization of the forces applied onto an object grasped by a robotic arm and the maximization of the stiffness of a cantilever beam. |
LinkedIn Internship ProjectsIn the summers of 2023 and 2022 I worked as an Artificial Intelligence - Machine Learning Engineer in the Ads AI organization at LinkedIn in Mountain View, California. |

|
Embedding-based Retrieval for Audience Expansion
Angelos Mavrogiannis, Chao Wang, Alice Wu Internship Project, 2024 My intern project focused on on incorporating new embedding-based features into an existing two-tower recommendation model towards audience targeting. To this end, I orchestrated a vLLM- and HuggingFace-powered batch inference pipeline to generate LLM LinkedIn member and ad campaign embeddings. I integrated the embeddings as input features into a two-tower recommendation model for embedding-based retrieval and trained the model towards expanding the target audience of a campaign, outperforming the existing baseline in production. |
|
Audience Targeting using Open-Source Large Language Models
Angelos Mavrogiannis, Jiarui Wang, Jinghui Mo, Alice Wu Internship Project, 2023 (Patent application filed in April 2024) My summer 2023 intern project introduced open-source generative AI in the LinkedIn audience targeting pipeline. I used Low Rank Adaptation (LoRA) to fine-tune state-of-the-art open-source Large Language Models, quantitatively compared them and identified the best performing task-specific model. Fine-tuning this model, I outperformed the existing baseline used in production for automatic audience targeting in user-defined advertising campaigns. |

|
Automatic Bidding using Deep Reinforcement Learning
Angelos Mavrogiannis, Yuanlong Chen, Min Liu Internship Project, 2022 I developed a DRL framework for multi-constraint automatic bidding towards optimizing the LinkedIn Ads platform. The framework was built upon OpenAI gym, using synthetic data to simulate a 2nd price auction real-time bidding environment. This project was the stepping stone for a DRL-based system that was subsequently used in production for automatic bidding at LinkedIn. |
Course ProjectsRepresentative group course projects at UMD and CMU. For more projects check my CV. |

|
Evaluating the Fairness of Diffusion-based Face Generation from Conversational Text - A Pilot Study
Angelos Mavrogiannis, Vishnu Shashank Dorbala Technical Report, UMD CMSC 828I: Trustworthy Machine Learning, Fall 2023 report In this work we measure the fairness of diffusion-based face generation models powered by conversational input data in textual form. We design a pilot study where participants answer LLM-generated non-intrusive questions about themselves with the goal of implicitly extracting facial features to build an informed prompt for face generation. |
|
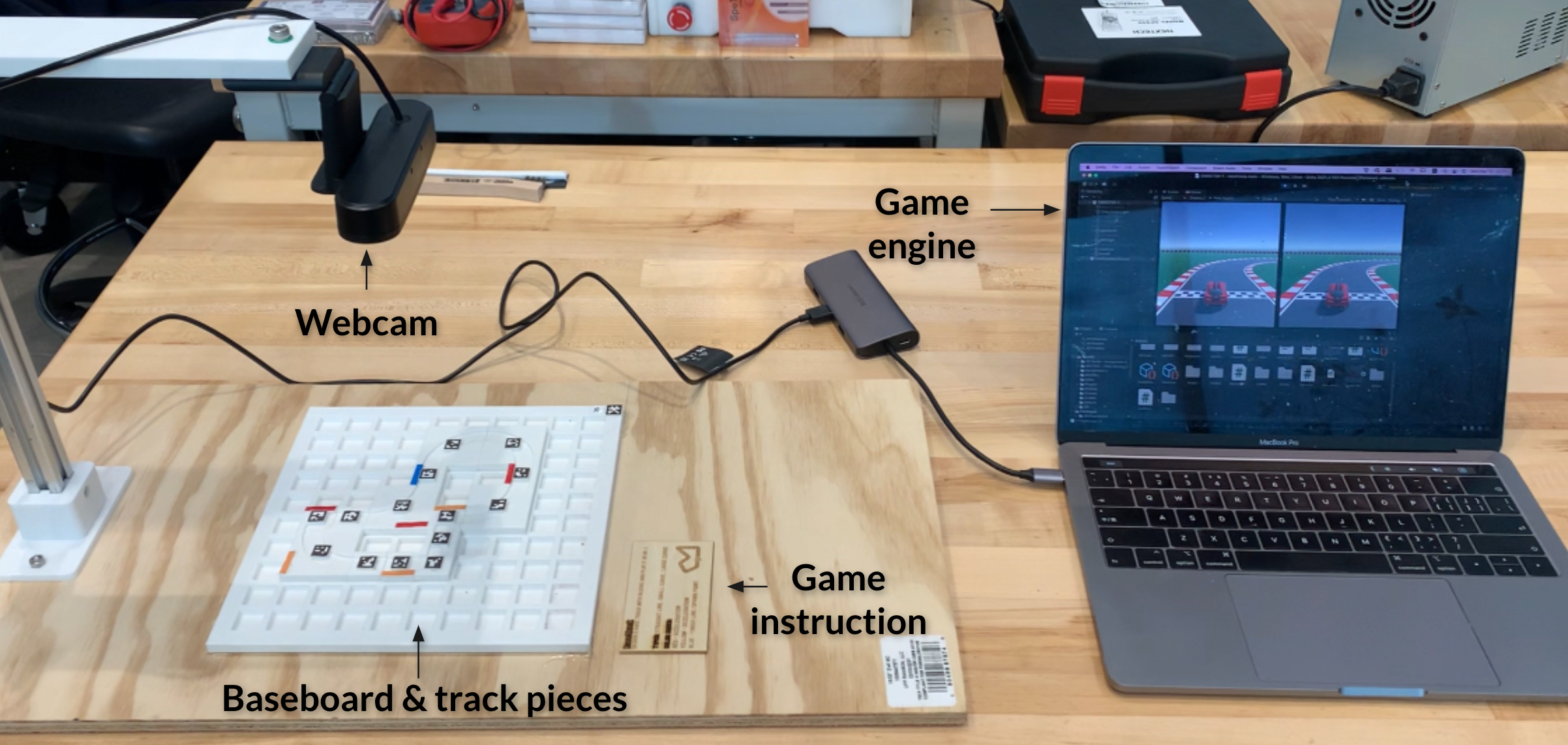
VR-Integrated Real-Time Racetrack Simulator
Angelos Mavrogiannis, Zining Zhang, Logan Stevens, Elliot Huang, Hyekang Kevin Joo Technical Report, UMD CMSC 730: Interactive Technologies in HCI, Fall 2022 report Proposed and led a group project on building a 3D-printed chessboard-resembling racetrack and an interactive system that converts it to a VRsimulated racing environment. Implemented the computer vision module, tracking the position and orientation of the pieces using ArUco markers and mapping them to poses and ego-vehicle control commands in a simulated racetrack in Unity. |
|
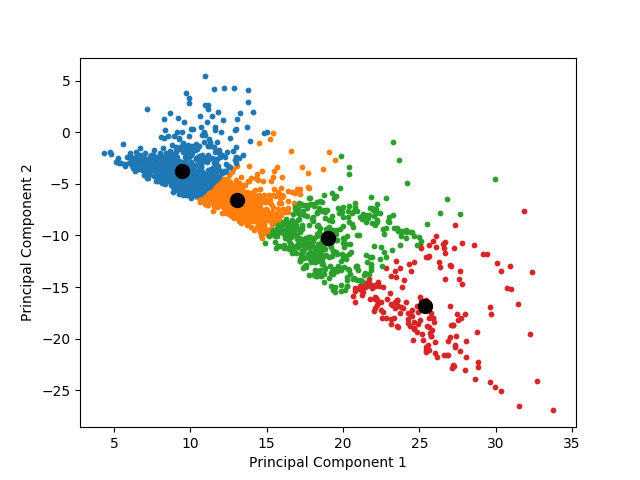
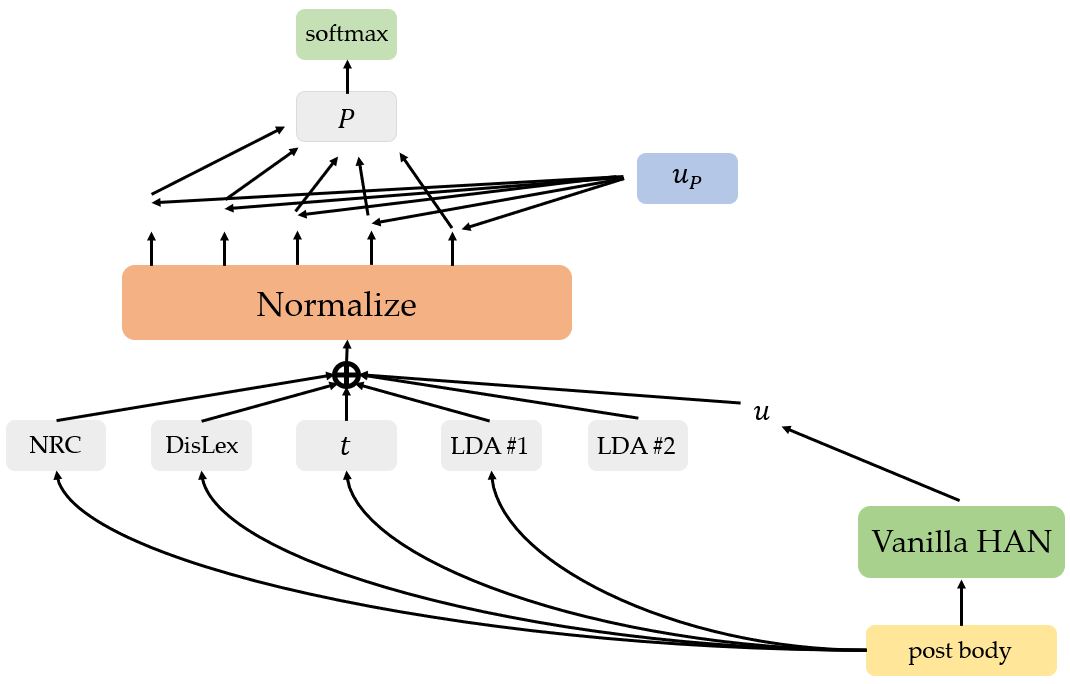
Predictive Modeling Using Linguistic Signal for Suicidality in Social Media
Angelos Mavrogiannis, Divya Kothandaraman, Sanket Doshi, Yashish Maduwantha, Anchit Jain Technical Report, UMD CMSC 723: Computational Linguistics, Spring 2021 report This work uses a Hierarchical Attention Network architecture to assess the potential suicide risk of reddit users based on their post history. My contribution was the extraction of post-level features based on users’ emotional states and the tuning of a Latent Dirichlet Allocation (LDA) model to retrieve meaningful subreddit clusters. |

|
Bioinspired Robot Design
Angelos Mavrogiannis, Pranav Narahari, Aniruddhan Unni, William Moreno, Stam Athiniotis Technical Report, CMU 24-775: Robot Design & Experimentation, Spring 2019 report / video Collaborated with a team of students to design and manufacture an underwater penguin-inspired robot. The movement of the flippers was powered by an Arduino microcontroller controlling a ball-and-socket motion transmission mechanism. |
|
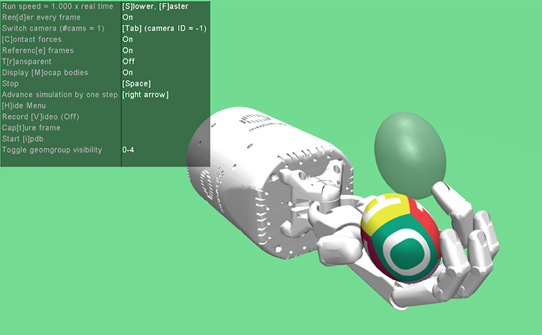
Object Pose Estimation from Manipulator Pose
Angelos Mavrogiannis, Satyaki Chakraborty, Suman Pokharel Technical Report, CMU 16-741: Mechanics of Manipulation, Fall 2018 report Collected a synthetic dataset of manipulator postures and object poses in OpenAI Gym. Trained a multilayer perceptron in order to map changes in hand pose to object displacements. Modified the OpenAI Gym simulator to demonstrate the predicted object pose and validated the method on occluded object tracking problems. |
Summer Schools |
|
|
The Machine Learning Summer School in Okinawa 2024
Machine Learning Summer Schools (MLSS), Okinawa Institute of Science and Technology (OIST), Riken AIP March 4-15, 2024, Okinawa, Japan (NeuroPAC AccelNet travel fellowship) poster |
|
4th Summer School on Social Human-Robot Interaction
Human Interactivity and Language Lab, Faculty of Psychology, University of Warsaw, IEEE Robotics & Automation Society September 18-23, 2023, Chęciny, Poland (IEEE Robotics & Automation Society scholarship) poster |

|
DISC Summer School 2021 for Planning, Learning and Control for Multi-Robot and Multi-Agent Systems
Dutch Institute of Systems and Control June 8-11, 2021, remote |
|
Robotics & AI Summer School
IRI - Institut de Robòtica i Informàtica Industrial June 28-30, 2021, remote |
|
3rd ACM Summer School in Data Science
Association for Computing Machinery, Athena Research and Innovation Center July 11-17, 2019, Athens, Greece |
|
Design and source code from Jon Barron's website. Do not scrape the HTML from this page itself, as it includes analytics tags that you do not want on your own website — use the github code instead. |